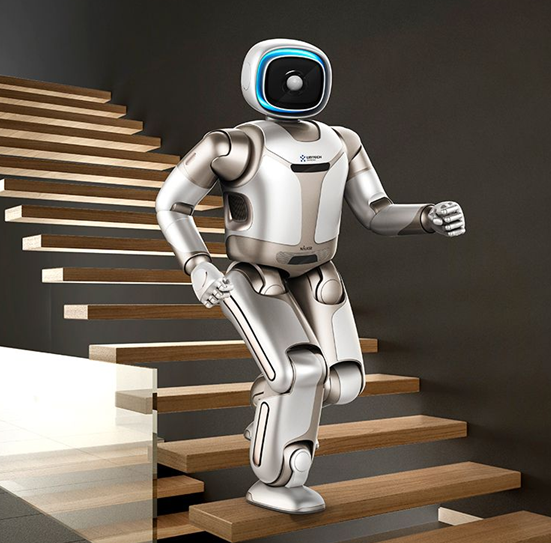
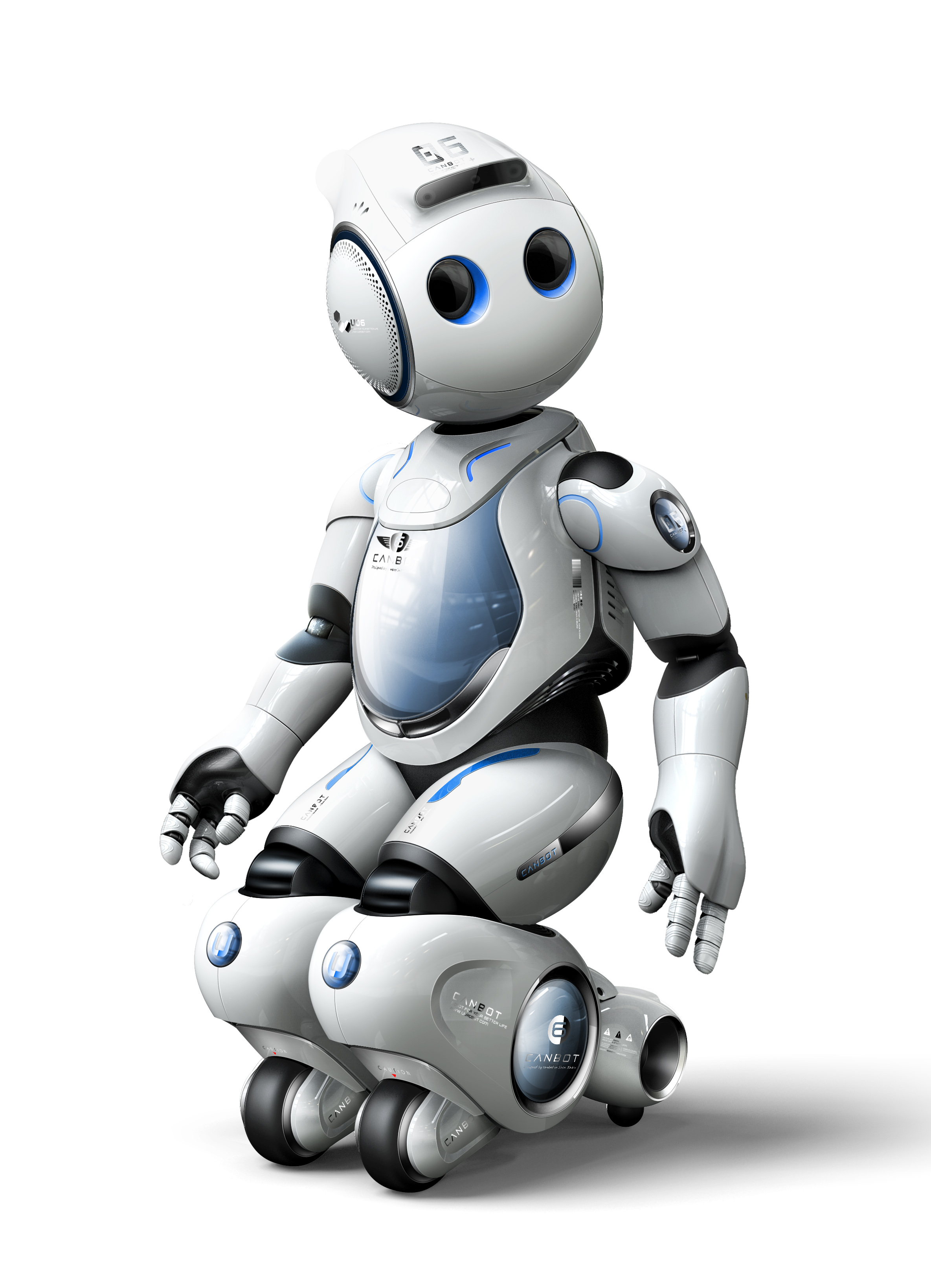
2019年直立行走的机器人端茶送水来了
blender机器人走路动画练习
机器人ieobolt双足自由度动态行走仿生仿人人行机器人
人形机器人规划和控制 全身运动规划之行走自然摆臂
儿童行走辅助外骨骼机器人
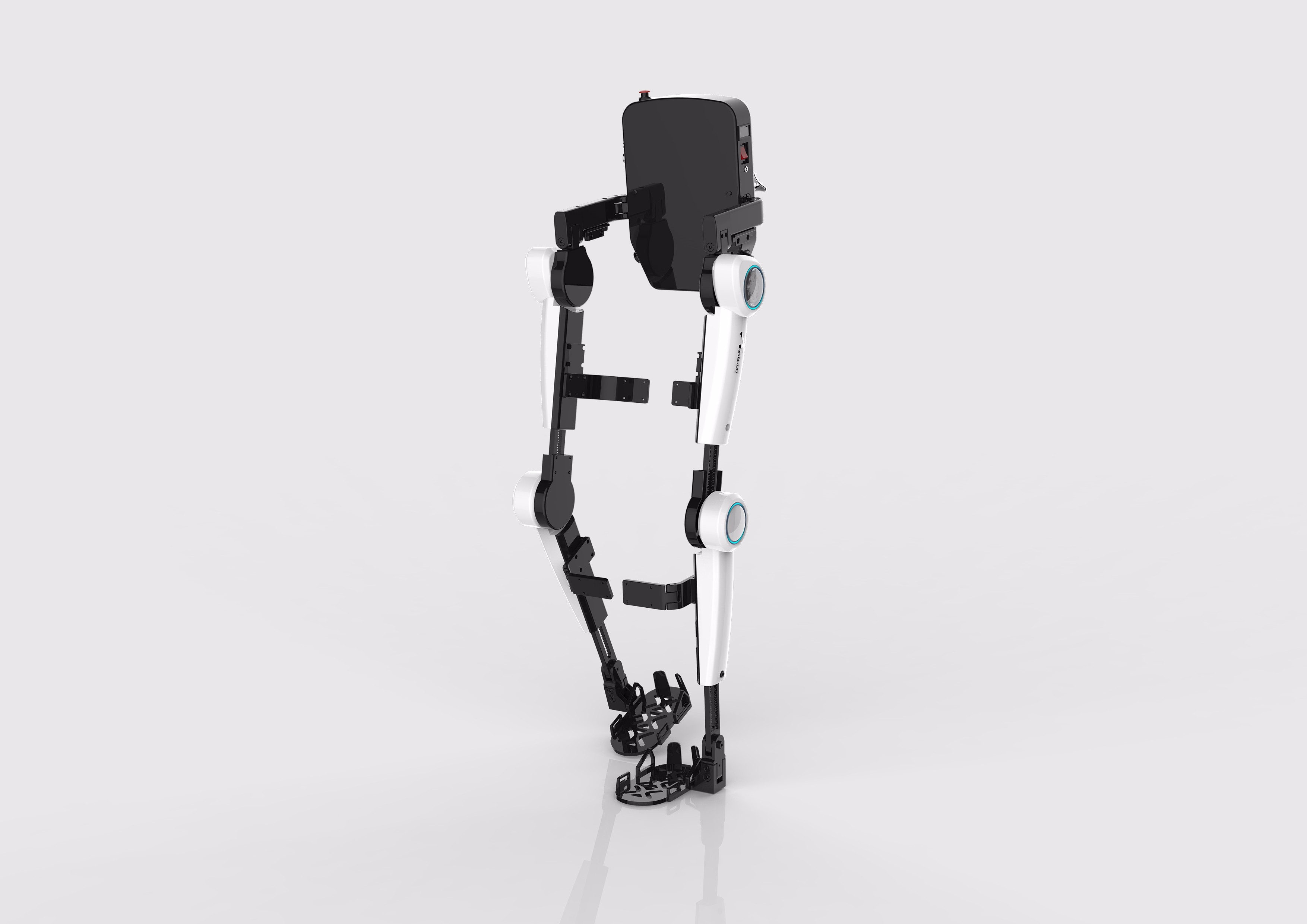
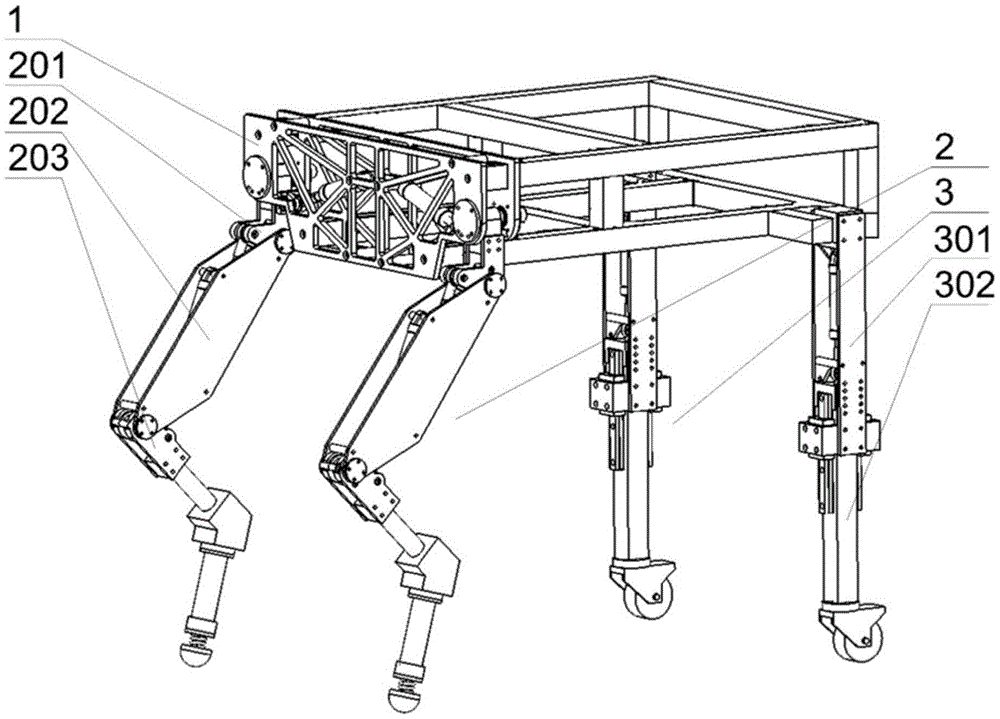
带轮子也可上楼梯的外骨骼辅助双足行走机器人
服务机器人
行走机器人rightsidelegsldasm
步行机器人设计
2020当代好设计奖xwalk外骨骼步行康复训练机器人200a
行走机器人2
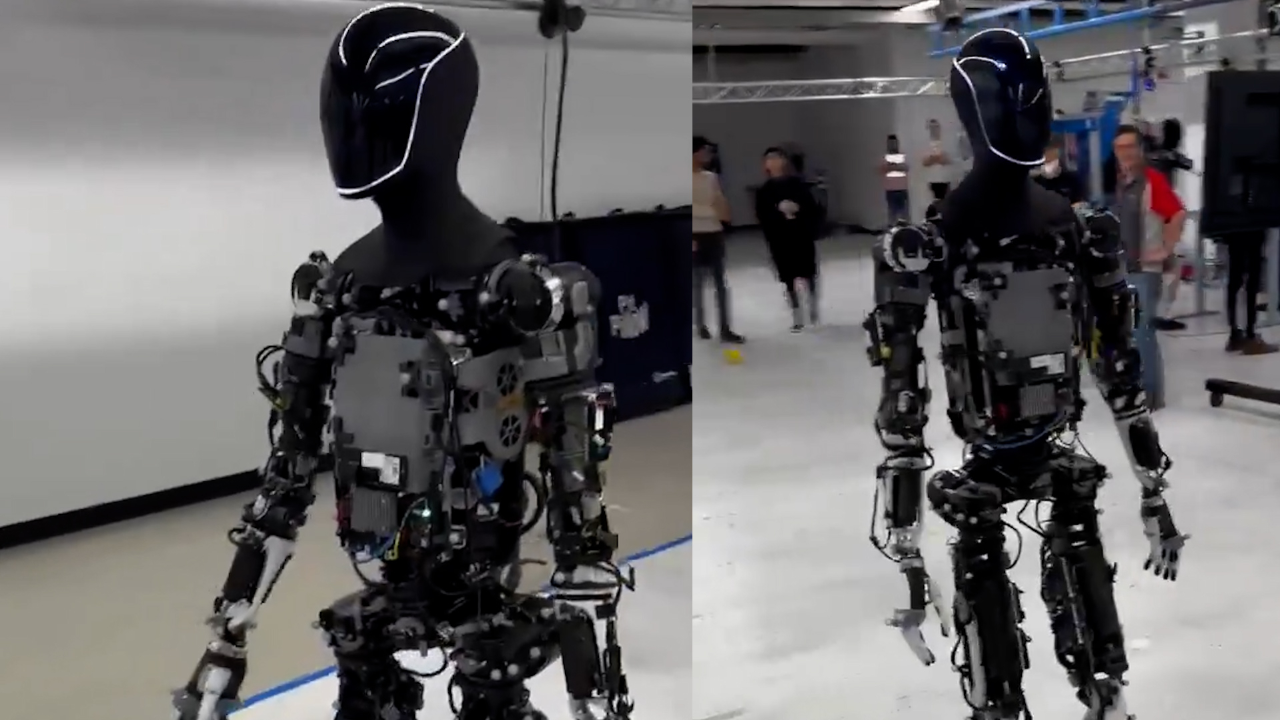
马斯克再晒特斯拉人形机器人行走视频 要去和擎天柱散散步了
荷福人形直立行走机器人
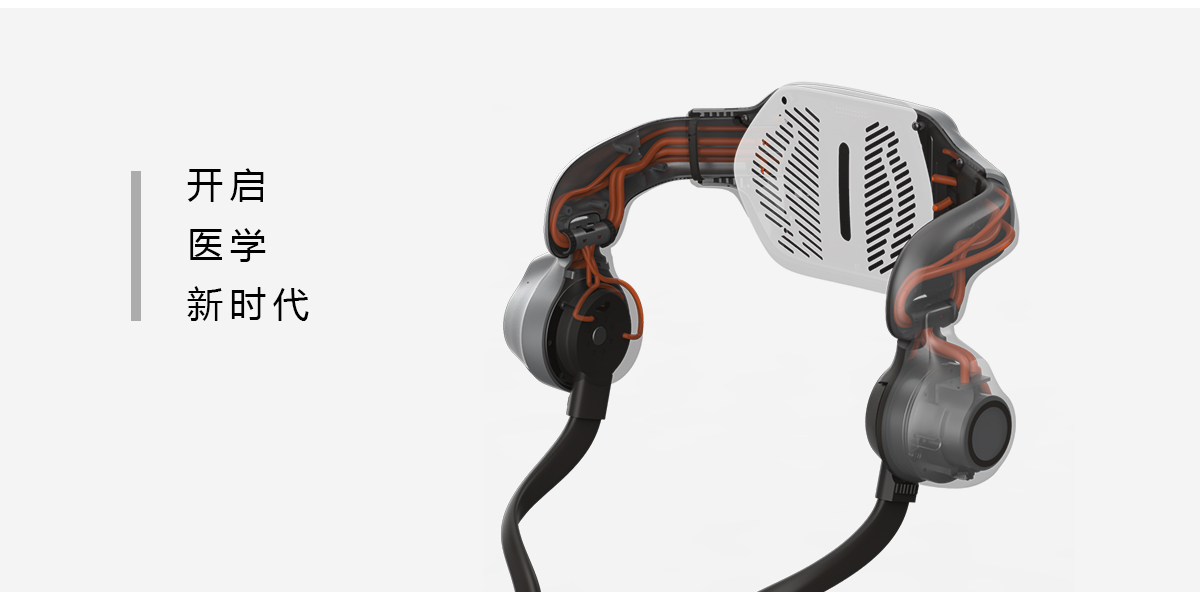
医疗产品设计
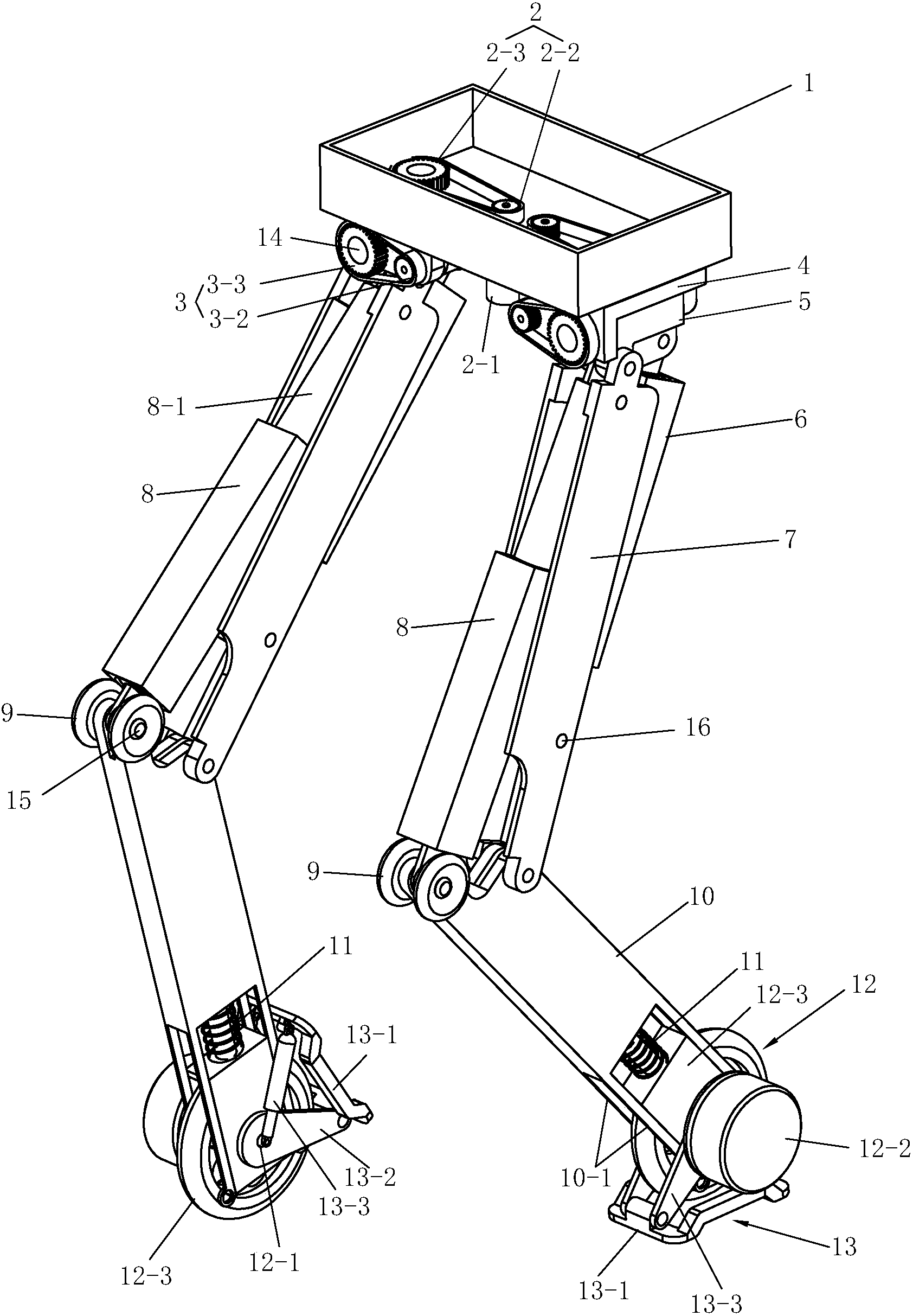
一种四足机器人行走机构
cn106240669a
拟人步行机器人的设计 10张cad图纸及说明书全套 yc系列
行走机器人设计方案效果图
cn101746431a
一个不错的产品设计